Haber
Doç. Dr. İsmail Uyanık'ın Projesine TÜBİTAK 1001 Desteği: Mobil Robotlarda Sensör Füzyonu ile Durum Kestirim ve Haritalama Performansının İyileştirilmesi
15 Ağustos 2025
Bölümümüz öğretim üyesi Doç. Dr. İsmail Uyanık'ın yürütücülüğünü üstlendiği "Mobil Robotlarda Sensör Füzyonu ile Durum Kestirim ve Haritalama Performansının İyileştirilmesi" başlıklı proje, TÜBİTAK 1001 programı kapsamında desteklenmeye hak kazandı.
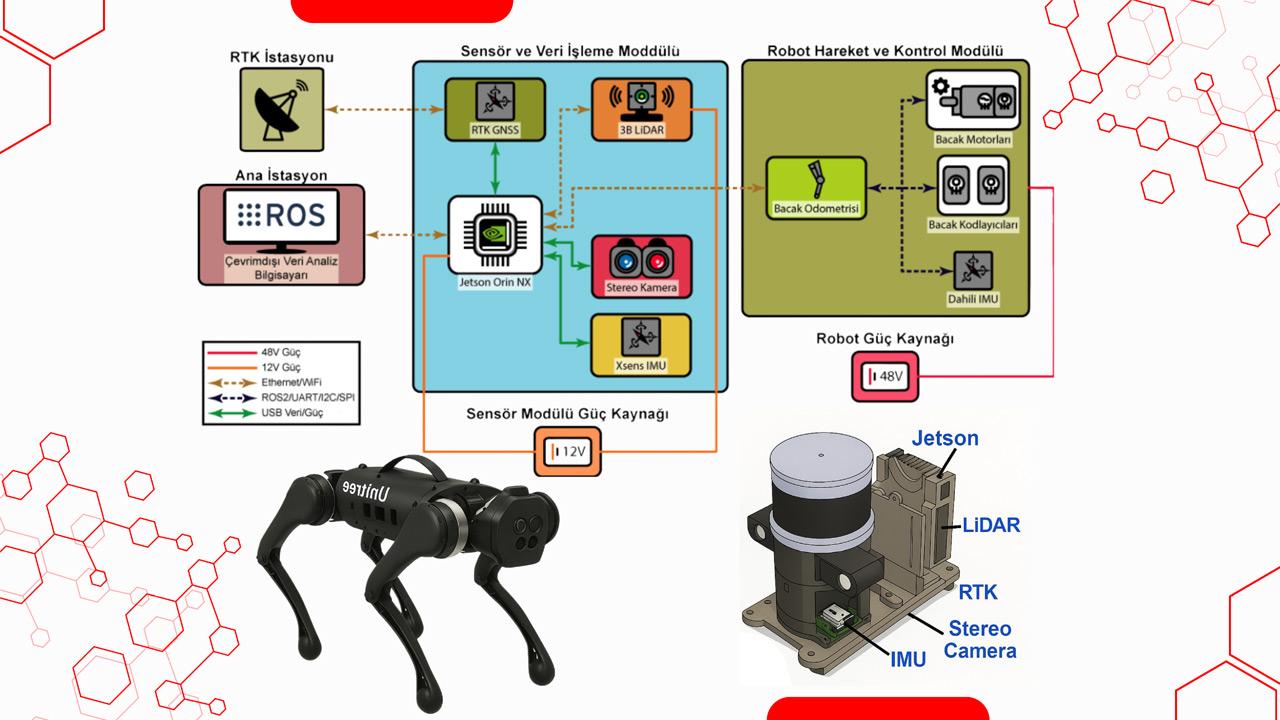
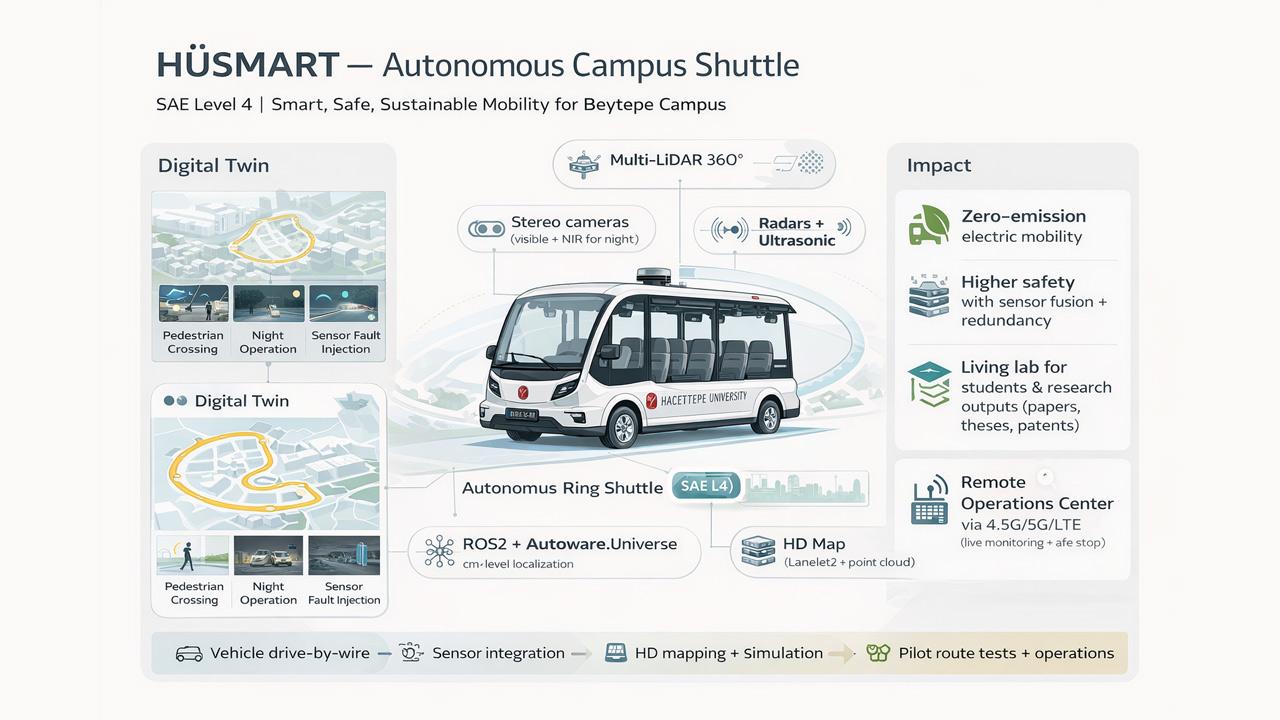
Proje, mobil robotların çevreyi daha doğru algılaması ve güvenilir şekilde hareket etmesi için gelişmiş "sensör füzyonu" tekniklerinin geliştirilmesini hedefliyor. LiDAR, kamera, hareket ve konum sensörlerinden gelen veriler birleştirilerek robotların hem kapalı hem de açık alanlarda yüksek hassasiyetle konum belirlemesi ve harita çıkarabilmesi sağlanacak.
Üç farklı yöntem üzerinde yapılacak testler ile en etkili sensör füzyonu yaklaşımı belirlenecek. Elde edilecek teknolojiler; arama-kurtarma, otonom araçlar, savunma ve endüstriyel robotik gibi alanlarda güvenilir navigasyon sistemlerinin geliştirilmesine katkı sunacak.
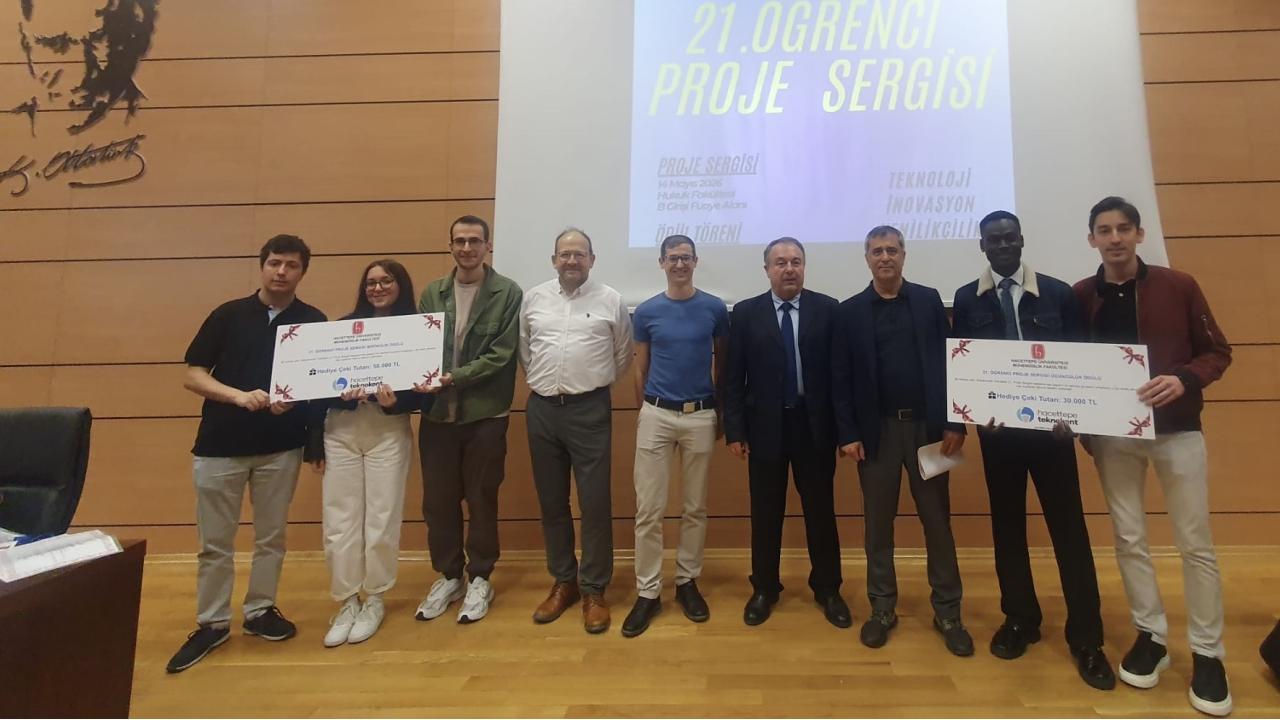
Prestijli projesi için öğretim üyemizi ve ekibini kutluyor, projede başarılar diliyoruz.
Üç farklı yöntem üzerinde yapılacak testler ile en etkili sensör füzyonu yaklaşımı belirlenecek. Elde edilecek teknolojiler; arama-kurtarma, otonom araçlar, savunma ve endüstriyel robotik gibi alanlarda güvenilir navigasyon sistemlerinin geliştirilmesine katkı sunacak.
Prestijli projesi için öğretim üyemizi ve ekibini kutluyor, projede başarılar diliyoruz.
Diğer haberler