News
TÜBİTAK 1001 Grant for Assoc. Prof. İsmail Uyanık’s Project: Enhancing State Estimation and Mapping Performance through Sensor Fusion in Mobile Robots
August 15, 2025
The project titled “Enhancing State Estimation and Mapping Performance through Sensor Fusion in Mobile Robots”, led by our faculty member Assoc. Prof. İsmail Uyanık, has been awarded funding under the TÜBİTAK 1001 program.
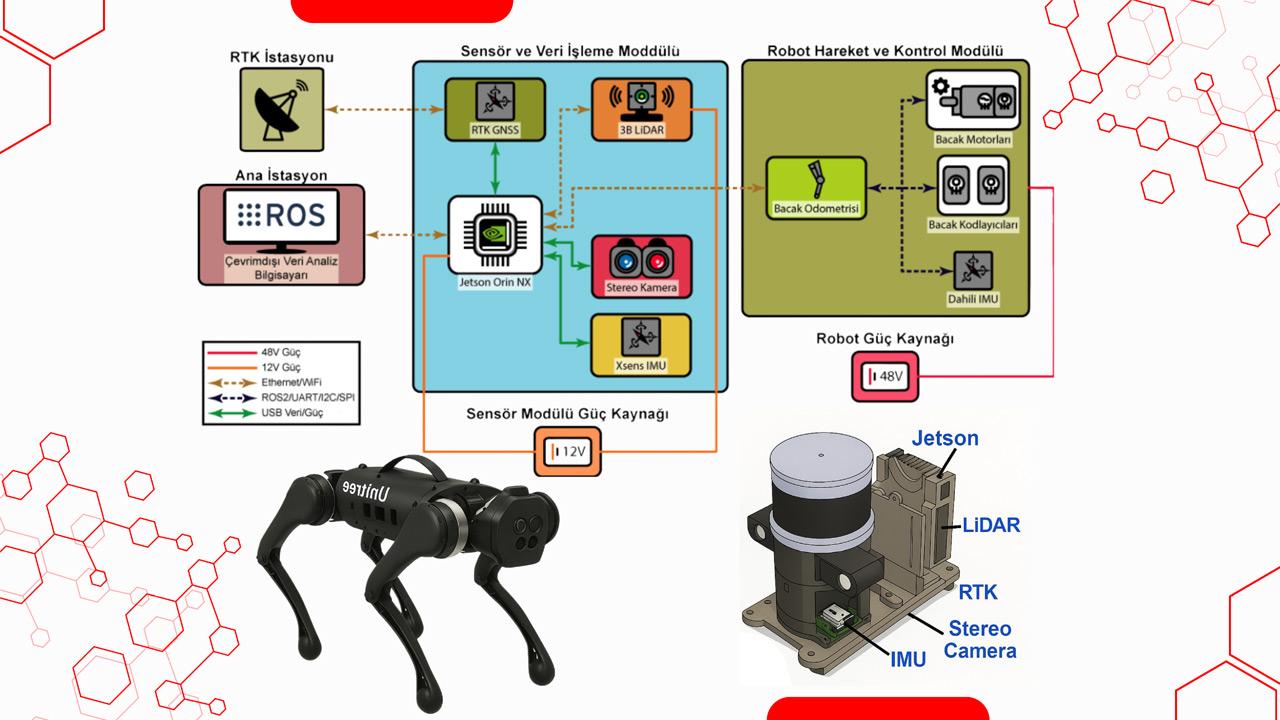
The project aims to develop advanced sensor fusion techniques to enable mobile robots to perceive their environment more accurately and move reliably. By combining data from LiDAR, cameras, motion, and positioning sensors, robots will be able to achieve highly precise localization and mapping in both indoor and outdoor environments.
Through tests on three different methods, the most effective sensor fusion approach will be identified. The resulting technologies will contribute to the development of reliable navigation systems in areas such as search and rescue, autonomous vehicles, defense, and industrial robotics.
We congratulate our faculty member and his team for this prestigious project and wish them success in their work.
Through tests on three different methods, the most effective sensor fusion approach will be identified. The resulting technologies will contribute to the development of reliable navigation systems in areas such as search and rescue, autonomous vehicles, defense, and industrial robotics.
We congratulate our faculty member and his team for this prestigious project and wish them success in their work.
More news